yüzbaşı Mehmet
Öğrenci
- Katılım
- 27 Haziran 2022
- Mesajlar
- 4
- Reaksiyon puanı
- 0
- Puanları
- 1
- Yaş
- 21
#define echoPin 13
#define trigPin 12
#define MotorR1 7
#define MotorR2 6
#define MotorRE 9
#define MotorL1 4
#define MotorL2 5
#define MotorLE 3
long sure, uzaklik;
void setup() {
pinMode(echoPin,INPUT);
pinMode(trigPin,OUTPUT);
pinMode(MotorR1,OUTPUT);
pinMode(MotorR2,OUTPUT);
pinMode(MotorRE,OUTPUT);
pinMode(MotorL1,OUTPUT);
pinMode(MotorL2,OUTPUT);
pinMode(MotorLE,OUTPUT);
}
void loop() {
digitalWrite(trigPin,LOW);
delayMicroseconds(5);
digitalWrite(trigPin,HIGH);
delayMicroseconds(10)
;digitalWrite(trigPin,LOW);
sure = pulseIn(echoPin,HIGH);
uzaklik = sure / 29.1 / 2;
if(uzaklik < 15)
{
void geri();
delay(500);
sag();
delay(500);
}
else{
void ileri();
}
}
void sag(){
digitalWrite(MotorR1, LOW);
digitalWrite(MotorR2, HIGH);
analogWrite(MotorLE, 150);
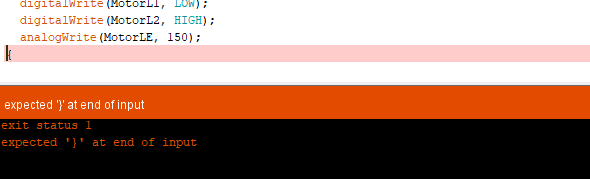
digitalWrite(MotorL1, HIGH);
digitalWrite(MotorL2, LOW);
analogWrite(MotorLE, 150);
void ileri()
digitalWrite(MotorR1,LOW)
digitalWrite(MotorR2,LOW);
analogWrite(MotorLE, 150);
digitalWrite(MotorL1, HIGH);
digitalWrite(MotorL2, LOW);
analogWrite(MotorLE, 150);
void geri(){
digitalWrite(MotorR1, LOW);
digitalWrite(MotorR2, HIGH);
analogWrite(MotorLE, 150);
digitalWrite(MotorL1, LOW);
digitalWrite(MotorL2, HIGH);
analogWrite(MotorLE, 150);
}

#define trigPin 12
#define MotorR1 7
#define MotorR2 6
#define MotorRE 9
#define MotorL1 4
#define MotorL2 5
#define MotorLE 3
long sure, uzaklik;
void setup() {
pinMode(echoPin,INPUT);
pinMode(trigPin,OUTPUT);
pinMode(MotorR1,OUTPUT);
pinMode(MotorR2,OUTPUT);
pinMode(MotorRE,OUTPUT);
pinMode(MotorL1,OUTPUT);
pinMode(MotorL2,OUTPUT);
pinMode(MotorLE,OUTPUT);
}
void loop() {
digitalWrite(trigPin,LOW);
delayMicroseconds(5);
digitalWrite(trigPin,HIGH);
delayMicroseconds(10)
;digitalWrite(trigPin,LOW);
sure = pulseIn(echoPin,HIGH);
uzaklik = sure / 29.1 / 2;
if(uzaklik < 15)
{
void geri();
delay(500);
sag();
delay(500);
}
else{
void ileri();
}
}
void sag(){
digitalWrite(MotorR1, LOW);
digitalWrite(MotorR2, HIGH);
analogWrite(MotorLE, 150);
digitalWrite(MotorL1, HIGH);
digitalWrite(MotorL2, LOW);
analogWrite(MotorLE, 150);
void ileri()
digitalWrite(MotorR1,LOW)
digitalWrite(MotorR2,LOW);
analogWrite(MotorLE, 150);
digitalWrite(MotorL1, HIGH);
digitalWrite(MotorL2, LOW);
analogWrite(MotorLE, 150);
void geri(){
digitalWrite(MotorR1, LOW);
digitalWrite(MotorR2, HIGH);
analogWrite(MotorLE, 150);
digitalWrite(MotorL1, LOW);
digitalWrite(MotorL2, HIGH);
analogWrite(MotorLE, 150);
}